
![]()
本ページの製品は2024年4月1日より、エフサステクノロジーズ株式会社に統合となり、順次、切り替えを実施してまいります。一部、富士通表記が混在することがありますので、ご了承ください。
ONTAP 9 マニュアル ( CA08871-402 )
リリース ノート
概要と概念
ONTAPの概念
Storage Efficiency
ONTAPのセットアップ、アップグレード、リバート
ONTAPのセットアップ
ONTAP System Managerを使用したクラスタのセットアップ
CLIを使用したクラスタのセットアップ
ONTAPのアップグレード
ONTAPのアップグレードの準備
ONTAPのアップグレード方法
ファームウェアとシステムの更新
ONTAPのリバート
リバート前にチェックが必要なその他の項目
SnapMirror
クラスタの管理
ONTAP System Managerを使用したクラスタ管理
CLIによるクラスタ管理
CLIを使用したクラスタへのアクセス(クラスタ管理者のみ)
ONTAPコマンドライン インターフェイスの使用
クラスタ管理(クラスタ管理者のみ)
SP / BMCネットワークの設定
SP / BMCを使用したリモートからのノード管理
ネットワーク インターフェイスを使用したSP / BMCファームウェアの更新
SP CLIセッション、SPコンソール セッション、システム コンソール セッションの関係
しきい値ベースのSPセンサーの読み取り値とsystem sensorsコマンドのステータス値について
クラスタ構成のバックアップとリストア(クラスタ管理者のみ)
ドライブと階層(アグリゲート)の管理
ローカル階層(アグリゲート)の管理
ローカル階層(アグリゲート)の追加(作成)
ローカル階層(アグリゲート)の使用の管理
ローカル階層(アグリゲート)のドライブとRAIDグループの情報の確認
Storage VM(SVM)へのローカル階層(アグリゲート)の割り当て
ローカル階層(アグリゲート)に配置されているボリュームの確認
ローカル階層(アグリゲート)への容量(ドライブ)の追加
ドライブの管理
ルート / データ パーティショニングの追加の管理オプション
RAID構成の管理
Flash Poolローカル階層(アグリゲート)の管理
Flash Poolローカル階層(アグリゲート)のキャッシング ポリシー
Flash Poolのキャッシング ポリシーの管理
Flash Poolローカル階層(アグリゲート)のキャッシング ポリシーを変更するかの確認
ストレージ プールを使用するFlash Poolローカル階層(アグリゲート)に対するFlash Pool SSDパーティショニング
物理SSDを使用するFlash Poolローカル階層(アグリゲート)の作成
SSDストレージ プールを使用したFlash Poolローカル階層(アグリゲート)の作成
Flash Poolローカル階層(アグリゲート)でSSDストレージ プールを使用しているかの確認
SSDストレージ プールの割当単位を使用したFlash Poolの作成
FabricPool階層の管理
FabricPoolの設定
FabricPoolの設定準備
FabricPoolのクラウド階層として使用するオブジェクト ストアのセットアップ
クラウド階層としてのGoogle Cloud Storageのセットアップ
FabricPoolの管理
Inactive Data Reportingによるボリューム内のアクセス頻度の低いデータ量の確認
FabricPoolのボリュームの管理
ユーザー独自のタグを使用したオブジェクトのタグ付け
FabricPoolミラーの管理
HAペアの管理
ボリューム管理
ONTAP System Managerを使用したボリュームとLUNの管理
CLIを使用した論理ストレージの管理
ボリュームの作成と管理
SANボリューム
ボリュームがフルになったときにスペースを自動的に確保するための設定
自動縮小とSnapshotコピーの自動削除両方を有効にするための要件
FlexVolのスペース不足アラートと過剰割り当てアラートへの対処
ボリュームの移動とコピー
FlexCloneボリュームによるFlexVolの効率的なコピーの作成
SnapMirrorの元のボリュームまたはデスティネーション ボリュームからFlexCloneボリュームを作成する際の考慮事項
FlexCloneファイルとFlexClone LUNによるファイルとLUNの効率的なコピーの作成
FlexCloneファイルまたはFlexClone LUNの作成
FlexCloneファイルおよびFlexClone LUNの作成や削除に使用できるノード容量の表示
FlexCloneファイルとFlexClone LUNによるスペース削減の表示
FlexCloneファイルおよびFlexClone LUNの削除方法
自動削除設定でFlexVolの空きスペースを再生する仕組み
FlexCloneファイルおよびFlexClone LUNを自動的に削除するためのFlexVolの設定
qtreeを使用したFlexVolのパーティショニング
クォータを使用したリソース使用量の制限または追跡
クォータ プロセスの概要
ハード クォータ、ソフト クォータ、およびしきい値クォータの違い
ユーザーおよびグループとクォータ
ツリー クォータの機能
qtreeの変更がクォータに与える影響
クォータ情報の表示方法
クォータ レポートを使用した特定ファイルへの書き込みを制限しているクォータの特定
volume quota policy rule showコマンドとvolume quota reportコマンドのどちらを使用するか
クォータ レポートとUNIXクライアントで表示されるスペース使用量の相違
重複排除、データ圧縮、データ コンパクションによるストレージ効率の向上
ETERNUS AX seriesシステムでのボリュームレベルの自動バックグラウンド重複排除の管理
ETERNUS AX seriesシステムでアグリゲートレベルのインライン重複排除を管理します。
ETERNUS AX seriesシステムでのアグリゲートレベルのバックグラウンド重複排除の管理
ボリューム移動とSnapMirrorでのStorage Efficiencyの動作
ETERNUS AX seriesのインライン データ コンパクションの管理
ETERNUS HX seriesのインライン データ コンパクションの有効化
ETERNUS AX seriesシステムでのインラインのStorage Efficiency機能のデフォルトでの有効化
効率化処理を実行するボリューム効率化ポリシーの作成
あるSVMから別のSVMへのボリュームのリホスト
推奨されるボリュームとファイルまたはLUNの設定の組み合わせ
スペース リザーブ ファイルまたはスペース リザーブLUNとシックプロビジョニング ボリュームを組み合わせた場合の設定
スペース リザーブなしのファイルまたはスペース リザーブなしのLUNとシンプロビジョニング ボリュームを組み合わせた場合の設定
スペース リザーブ ファイルまたはスペース リザーブLUNとセミシック ボリューム プロビジョニングを組み合わせた場合の設定
ファイルおよびディレクトリーの容量を変更する際の注意事項および考慮事項
FlexVolに許可される最大ファイル数の変更に関する考慮事項
FlexVolの最大ディレクトリー サイズを増やす場合の注意事項
FlexCloneファイルとFlexClone LUNでサポートされる機能
FlexCloneファイルおよびFlexClone LUNと重複排除
FlexCloneファイルおよびFlexClone LUNとSnapshotコピー
FlexCloneファイルおよびFlexClone LUNでのアクセス制御リストの処理
FlexCloneファイルおよびFlexClone LUNとクォータ
FlexCloneファイルおよびFlexClone LUNとFlexCloneボリューム
FlexCloneファイルおよびFlexClone LUNとNDMP
FlexCloneファイルおよびFlexClone LUNとVolume SnapMirror
ボリューム移動がFlexCloneファイルとFlexClone LUNに及ぼす影響
FlexGroupボリュームを使用した大規模ファイルシステム用NASストレージのプロビジョニング
CLIを使用したFlexGroupボリュームの管理
FlexGroupボリュームでサポートされる機能とサポートされない機能
FlexGroupボリュームの管理
FlexGroupボリュームのサイズを自動的に拡張および縮小するための設定
FlexGroupボリュームでのStorage Efficiencyの有効化
Snapshotコピーを使用したFlexGroupボリュームの保護
FlexGroupボリュームのデータ保護
FlexGroupボリュームのSnapMirror関係の作成
FlexGroupボリュームの一元化されたデータ保護関係の作成
FlexGroupボリュームのSVMディザスタ リカバリー関係の作成
FlexGroupの既存のSnapMirror関係からSVM DRへの移行
SVM-DR関係におけるFlexVolからFlexGroupボリュームへの変換
FlexGroupのSnapMirrorカスケード / ファンアウト関係の作成に関する考慮事項
FlexGroupボリュームに対するデータ保護処理の管理
SnapMirror関係にあるFlexGroupボリュームの拡張
FlexGroupボリュームからのSnapMirror単一ファイルのリストア
FlexVolからFlexGroupボリュームへの変換
ネットワーク管理
ネットワーク ポート
ブロードキャスト ドメイン
論理インターフェイス(LIF)
ネットワーク負荷の分散
SNMPの管理(クラスタ管理者のみ)
ネットワーク情報の表示
NASストレージの管理
ONTAP System Managerを使用したNASプロトコルの管理
CLIを使用したNFSの設定
SVMへのNFSアクセスの設定
SVMルート ボリュームのエクスポート ポリシーによるアクセスの許可
ネーム サービスの設定
ローカルUNIXユーザーおよびグループの設定
NFSでのKerberos使用によるセキュリティ強化
NFS対応SVMへのストレージ容量の追加
CLIを使用したNFSの管理
NASファイル アクセスについて
ONTAPによるNFSクライアント認証の処理
セキュリティ形式の設定
セキュリティ形式がデータ アクセスに与える影響
NFSを使用したファイル アクセスの設定
エクスポート ポリシーを使用したNFSアクセスの保護
エクスポート ポリシーがボリュームまたはqtreeへのクライアント アクセスを制御する仕組み
ネーム サービスの設定
ネーム マッピングの設定
NFSを使用したファイル アクセスの管理
不明なUNIXユーザーによるNTFSボリュームまたはqtreeへのNFSアクセスの処理
非予約ポートを使用してNFSエクスポートをマウントするクライアントに関する注意事項
ドメインの検証によるネットグループのより厳密なアクセス チェックの実行
ローカルUNIXユーザー、グループ、およびグループ メンバーに対する制限
LDAPクライアント スキーマ テンプレートの管理用コマンド
NFS Kerberosインターフェイス設定の管理用コマンド
ファイル ロックの管理
NFSでのFPolicyのfirst-readおよびfirst-writeフィルターの動作
NFSv4 ACLの管理
VMware vStorage over NFSの有効化または無効化
サポートされるNFSバージョンおよびクライアント
NFSトランキングの管理
トランキング用に新しいNFSサーバーとエクスポートを設定する
既存のNFSエクスポートをトランキング用に調整する
CLIを使用したSMBの設定
SVMへのSMBアクセスの設定
SVMルート ボリュームのエクスポート ポリシーによるアクセスの許可
Active DirectoryドメインでのSMBサーバーのセットアップ
共有ストレージへのSMBクライアント アクセスの設定
CLIを使用したSMBの管理
SMBサーバーのサポート
SMBサーバーの管理
オプションを使用したSMBサーバーのカスタマイズ
UNIXセキュリティ形式のデータに対するファイル セキュリティのSMBクライアントへの提供方法の管理
SMBサーバーのセキュリティ設定の管理
SVMディザスタ リカバリー構成でのSMBサーバー セキュリティ設定に関するガイドライン
ローカルSMBユーザーに対するパスワードの複雑さの要件の有効化と無効化
AES暗号化によるKerberosベースの通信の強固なセキュリティ設定
Kerberosベースの通信用のAES暗号化の有効化と無効化
SMB署名を使用したネットワーク セキュリティの強化
SMB経由のデータ転送でのSMBサーバーのSMB暗号化要求の設定
LDAPセッションの通信の保護
パフォーマンスと冗長性を高めるためのSMBマルチチャネルの設定
SMBサーバーでのデフォルトWindowsユーザーからUNIXユーザーへのマッピングの設定
SMBセッション経由で接続しているユーザーのタイプ情報の表示
Windowsクライアントの過剰なリソース消費を制限するコマンド オプション
従来のoplockおよびoplockリースでのクライアント パフォーマンスの向上
oplockを使用するときの書き込みキャッシュ データ消失に関する考慮事項
SMBサーバーへのグループ ポリシー オブジェクトの適用
CIFSサーバー コンピューター アカウント パスワードの管理用コマンド
ドメイン コントローラー接続の管理
非Kerberos環境でストレージにアクセスするためのnullセッションの使用
SMBサーバー用のNetBIOSエイリアスの管理
SMBサーバーに関するその他のタスクの管理
SMBを使用したファイル アクセスの設定
セキュリティ形式の設定
セキュリティ形式がデータ アクセスに与える影響
ネーム マッピングの設定
マルチドメイン ネーム マッピング検索の設定
ファイル権限を使用したファイル アクセスの保護
ダイナミック アクセス制御(DAC)を使用したファイル アクセスの保護
CIFSサーバーでダイナミック アクセス制御と集約型アクセス ポリシーを使用する際の考慮事項
ダイナミック アクセス制御が無効な場合のダイナミック アクセス制御ACEを含むACLの管理
エクスポート ポリシーを使用したSMBアクセスの保護
ストレージレベルのアクセス保護を使用したファイル アクセスの保護
SMBを使用したファイル アクセスの管理
ローカル ユーザーおよびローカル グループを使用した認証と許可
ONTAPでのローカル ユーザーとローカル グループの使用方法
ローカル グループを含むSVMでのSnapMirrorの使用に関するガイドライン
CIFSサーバーを削除したときにローカル ユーザーとローカル グループが受ける影響
BUILTINグループとローカル管理者アカウントの使用に関するガイドライン
ローカル ユーザー アカウントの管理
ローカル グループの管理
トラバース チェックのバイパスの設定
ファイル セキュリティと監査ポリシーに関する情報の表示
NTFSセキュリティ形式のボリュームのファイル セキュリティに関する情報の表示
mixedセキュリティ形式のボリュームのファイル セキュリティに関する情報の表示
UNIXセキュリティ形式のボリュームのファイル セキュリティに関する情報の表示
CLIを使用したFlexVolのNTFS監査ポリシーに関する情報の表示
CLIを使用したSVMのNTFSファイル セキュリティ、NTFS監査ポリシー、ストレージレベルのアクセス保護の管理
CLIを使用してファイルおよびフォルダーのセキュリティを設定するユースケース
CLIを使用してファイルおよびフォルダーのセキュリティを設定する場合の制限事項
セキュリティ記述子を使用したファイルおよびフォルダーのセキュリティ設定
SVMディザスタ リカバリー デスティネーションでローカル ユーザーまたはグループを使用するファイルとディレクトリーのポリシーを適用する際のガイドライン
CLIを使用したNTFSファイルおよびフォルダーに対するファイル セキュリティの設定および適用
ファイル ロックの管理
SMBクライアントベースのサービスの導入
オフライン ファイルを使用したオフラインで使用するファイルのキャッシング
SMBサーバーベースのサービスの導入
UNIXシンボリック リンクへのSMBクライアント アクセスの設定
ONTAPを使用してUNIXシンボリック リンクへのSMBクライアント アクセスを提供する方法
SMBアクセス用にUNIXシンボリック リンクを設定する場合の制限
BranchCacheを使用したブランチ オフィスでのSMB共有のコンテンツのキャッシュ
要件とガイドライン
Auto LocationとSMB自動ノード リファーラルによるクライアント応答時間の短縮
Microsoft Hyper-VおよびSQL Server向けのSMBの設定
Microsoft Hyper-V over SMBおよびSQL Server over SMBソリューション用のONTAPの設定
Hyper-VおよびSQL Server over SMBでのノンストップ オペレーション
SMB経由のノンストップ オペレーションを実現するプロトコル
Hyper-VおよびSQL Server over SMBでのノンストップ オペレーションの主要な概念
SMB 3.0の機能がSMB共有を介したノンストップ オペレーションをサポートする仕組み
リモートVSSによる共有ベースのバックアップ
SnapManager for Hyper-VによるHyper-V over SMBのリモートVSSベースのバックアップの管理方法
Hyper-V over SMBおよびSQL Server over SMB共有でのODXコピー オフロードの使用方法
設定要件と考慮事項
Hyper-V over SMB用のSMBサーバーとボリュームの要件
SQL Server over SMB用のSMBサーバーとボリュームの要件
Hyper-V over SMBでの継続的可用性を備えた共有の要件と考慮事項
SQL Server over SMBでの継続的可用性を備えた共有の要件と考慮事項
SQL ServerおよびHyper-V over SMB構成に関する推奨事項
Hyper-V over SMBおよびSQL Server over SMBでノンストップ オペレーションを実現するためのONTAP設定
Kerberos認証およびNTLMv2認証の許可の確認(Hyper-V over SMB共有)
ドメイン アカウントがデフォルトのUNIXユーザーにマッピングされていることの確認
SVMルート ボリュームのセキュリティ形式がNTFSに設定されていることの確認
パフォーマンスと冗長性を高めるためのSMBマルチチャネルの設定
SANストレージの管理
SANの概念
SANボリュームについて
igroupのイニシエータのWWPNとiSCSIノード名の指定
VMwareとMicrosoftのコピー オフロードによるストレージ仮想化
SAN管理
igroupとポートセットの管理
iSCSIプロトコルの管理
NVMeプロトコルの管理
FCアダプターを搭載したシステムの管理
すべてのSANプロトコルのLIFの管理
SANデータ保護
LUNの移動またはコピーがSnapshotコピーに及ぼす影響
FlexClone LUNを使用したデータの保護
FlexCloneファイルおよびFlexClone LUNを自動的に削除するためのFlexVolの設定
SAN環境でのSnapVaultバックアップの設定と使用
SAN構成に関するリファレンス
FCの構成
FCアダプターを搭載したシステムの管理
Fibre ChannelおよびFCoEのゾーニング
S3オブジェクト ストレージの管理
設定
SVMへのS3アクセスの設定
アクセス ポリシー ステートメントの作成と変更
S3オブジェクト ストレージへのクライアント アクセスの有効化
リモートのFabricPool階層化用ONTAP S3アクセスの有効化
S3 SnapMirrorによるバケットの保護
認証とアクセス制御
管理者認証とRBACの管理
ログイン アカウントの作成
ローカル アカウント アクセスの有効化
アクセス制御ロールの管理
OAuth 2.0を使用した認証と許可
Webサービスの管理
セキュリティとデータ暗号化
ONTAP System Managerを使用したセキュリティ
ランサムウェアからの保護
ウイルスからの保護
スキャナ プールの設定
SVMでのNASイベントの監査
監査できるNFSファイルおよびディレクトリーのアクセス イベント
ファイルおよびディレクトリーに適用されている監査ポリシーに関する情報の表示
Windowsの[セキュリティ]タブを使用した監査ポリシーに関する情報の表示
監査できるCLI変更イベント
SVMでのFPolicyによるファイルの監視と管理
FPolicyとは
FPolicy設定の計画
FPolicy設定時の要件、考慮事項、およびベストプラクティス
FPolicy外部エンジンの設定の計画
SSL認証接続を使用するためのFPolicy外部エンジン設定についての追加情報
非ID保持設定のSVMディザスタ リカバリー関係で証明書がレプリケートされない
FPolicy設定の管理
FPolicy設定に関する情報の表示
セキュリティ トレースを使用したアクセスの検証
セキュリティ トレースの実行
CLIを使用した暗号化の管理
Volume Encryptionの設定
ハードウェアベースの暗号化の設定
外部キー管理の設定
Encryptionの管理
volume encryption rekey startコマンドを使用したボリュームの暗号化キーの変更
Storage Encryptionの認証キーのローテーション
暗号化されたボリュームでのデータのセキュアー パージ
SnapMirror関係にない暗号化されたボリュームでのデータのセキュアー パージ
FIPSドライブまたはSEDのデータにアクセスできない状態にする方法
データ保護とディザスタ リカバリー
ONTAP System Managerによるデータ保護
CLIを使用したクラスタとSVMのピアリング
ローカルSnapshotコピーの管理
手動でのSnapshotコピーの管理
SnapMirrorボリューム レプリケーション
SnapMirror Synchronousディザスタ リカバリーの基本
StrictSyncポリシーとSyncポリシーでサポートされるワークロードについて
SnapMirrorテクノロジを使用したバックアップのアーカイブ
SnapMirrorのライセンス
SnapMirrorボリューム レプリケーションの管理
レプリケーション関係の一度に一手順での設定
SnapMirror Synchronous関係のモードの変換
SnapMirrorフェイルオーバー テスト ボリュームの作成と削除
SnapMirror DRデスティネーション ボリュームからのデータの提供
SnapMirrorデスティネーション ボリュームからのファイルのリストア
SnapMirror SVMレプリケーションの管理
SnapMirrorの技術的な詳細
SnapMirror Active Sync
SnapMirror Active Syncの管理とデータの保護
MetroClusterとSnapMirror Active SyncのためのMediatorサービス
インストールまたはアップグレード
ONTAP System Managerを使用したMetroClusterサイトの管理
MetroClusterのスイッチオーバーとスイッチバックの実行
テープ バックアップを使用したデータ保護
テープ ドライブの管理
FlexVolのNDMP
FlexVolのSVMを対象としたNDMPモードの管理
異なるLIFタイプでのバックアップおよびリストアに使用できるボリュームとテープ デバイス
FlexVolのテープ バックアップおよびリストア処理の監視
FlexVolのテープ バックアップおよびリストアに関するエラー メッセージ
バックアップおよびリストアに関するエラー メッセージ
Resource limitation: no available thread
Maximum number of allowed dumps or restores (maximum session limit) in progress
Tape write failed - new tape encountered media error
Tape write failed - new tape is broken or write protected
Tape write failed - new tape is already at the end of media
Tape record size is too small.Try a larger size.
NDMPに関するエラー メッセージ
Message from Read Socket: error_string
Message from Write Dirnet: error_string
ndmpd invalid version number: version_number ``
ndmpd session session_ID not active
Could not obtain vol ref for Volume volume_name
DATA LISTEN: CAB data connection prepare precondition error
DATA CONNECT: CAB data connection prepare precondition error
Error:show failed: Cannot get password for user '<username>'
ダンプに関するエラー メッセージ
Destination volume is read-only
Destination qtree is read-only
Dumps temporarily disabled on volume, try again
Restore of the file <file name> failed
Truncation failed for src inode <inode number>…
SMTapeに関するエラー メッセージ
Failed to initialize restore stream
Image header missing or corrupted
Invalid backup image magic number
Job aborted due to Snapshot autodelete
Tape is currently in use by other operations
Transfer failed (Aborted due to MetroCluster operation)
Transfer failed (ARL initiated abort)
Transfer failed (CFO initiated abort)
Transfer failed (SFO initiated abort)
Underlying aggregate under migration
NDMP設定
ElementソフトウェアとONTAPのレプリケーション
ElementソフトウェアでのSnapMirrorの有効化
レプリケーション関係の設定
SnapMirror DRデスティネーション ボリュームからのデータの提供
イベント、パフォーマンス、健全性の監視
ONTAP System Managerを使用したクラスタ パフォーマンスの監視
CLIを使用したクラスタ パフォーマンスの監視と管理
パフォーマンスの問題の管理
基本的なインフラ チェックの実施
Unified Managerを使用したクラスタ パフォーマンスの監視
AutoSupport
ONTAP System ManagerによるAutoSupportの管理
CLIによるAutoSupportの管理
AutoSupportメッセージが送信されるタイミングおよび場所
AutoSupportによるイベントトリガー型メッセージの作成と送信
イベントトリガー型AutoSupportメッセージで送信されるファイル
週単位のAutoSupportメッセージで送信されるファイル
スケジュールされたメンテナンス時間中のAutoSupportケースの抑制
メッセージを受信しない場合のAutoSupportのトラブルシューティング
HTTPまたはHTTPS経由でのAutoSupportメッセージ配信のトラブルシューティング
ファイルシステム分析
MetroClusterの継続的可用性
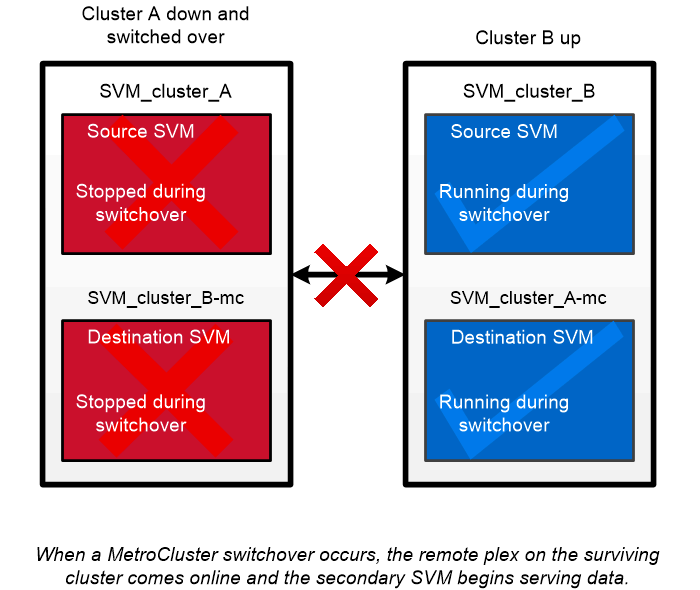
MetroCluster構成は、物理的に分離された2つのミラー クラスタを実装することでデータを保護します。各クラスタが、もう一方のクラスタのデータおよびSVM設定を同期的にレプリケートします。一方のサイトで災害が発生したときは、管理者はミラーリングされたSVMをアクティブ化し、ミラーリングされたデータをセカンダリー サイトから提供できます。
-
ファブリック接続MetroCluster 構成は、メトロポリタン規模のクラスタをサポートします。
いずれの場合も、クラスタ間でピア関係を確立する必要があります。
MetroClusterでは、SyncMirrorと呼ばれるONTAPの機能を使用して、各クラスタのアグリゲート データがもう一方のクラスタのストレージにあるコピー(プレックス)との間で同期的にミラーリングされます。スイッチオーバーが発生すると、サバイバー クラスタ上のリモート プレックスがオンラインになり、セカンダリーSVMがデータの提供を開始します。
MetroCluster以外の実装でのSyncMirrorの使用 アグリゲート データは、別々のドライブ シェルフに格納されたプレックス間でミラーリングされます。一方のシェルフが使用できなくなった場合、影響を受けていないプレックスが障害からの復旧作業中も引き続きデータを提供します。 SyncMirrorを使用してミラーリングされたアグリゲートは、ミラーリングされていないアグリゲートの2倍のストレージを必要とすることに注意してください。各プレックスに、ミラーリングするプレックスと同じ数のドライブが必要です。たとえば、1,440GBのアグリゲートをミラーリングするには、プレックス1つにつき1,440GB、合計で2,880GBのドライブ スペースが必要です。 SyncMirrorでは、ストレージのパフォーマンスと可用性を最適化するために、ミラーアグリゲート用に少なくとも20%の空きスペースを確保することを推奨します。ミラーされていないアグリゲートでは10%が推奨されますが、追加の10%のスペースはファイルシステムで増分変更に対応するために使用できます。増分変更を行うと、ONTAPのcopy-on-write Snapshotベースのアーキテクチャーにより、ミラーされたアグリゲートのスペース使用率が向上します。これらのベストプラクティスに従わないと、SyncMirrorの再同期のパフォーマンスが低下し、非共有クラウド環境のNDUやMetroCluster環境のスイッチバックなどの運用ワークフローに間接的に影響します。 |